简单说快门和闪光

本文所有图片均取自网络,感谢原作者奉献,如有不妥可联系我。
摄影中快门,光圈是最常关注的两个参数,也从一定方面反映出相机的性能。(构图之类完全是靠机身后面的头),对于具体的感光记录原理等这里不再赘述。
首先必须科普一下
1.“快门”是一个机械结构,而不是相机上那个按钮,那个按钮可以叫“快门释放按钮”,或者“快门按钮”,传统上快门是由外力控制保持关闭的,去掉外力(也就是“释放”)后就执行一次打开操作。
2.快门工作原理
由于光圈式快门基本绝迹(就是iphone拍照时“菊花一紧”的那个动画效果),这里就不说了。
一张图就说明清楚了,电子快门和帘幕式快门基本都是这个原理,假设感光元件是胶片(随时都可以好进行曝光的状态,电子快门和机械快门+CMOS最终效果和此图相同),通过快门控制,图中白色部分就是实际曝光区域。
(可以看出高速快门所记录的图像并不是“同一时刻”的,可以参考知乎此贴,有一个有趣的扭曲现象,http://www.zhihu.com/question/20899357)
3.闪光的效果
闪光的目的是让一定范围内(万元的闪光可以甚至可以点亮整个体育馆)的被摄物体在极短时间(通常要关注闪光时,闪光时间总是比快门速度快很多的)内有很高的亮度
好了,下面入正题,介绍一下低速曝光时的问题
通常低速快门意味着环境亮度较差,此时要关注的问题就是曝光量和相机抖动(光线好的时候基本没这些问题),这里只关注曝光量,抖动忽略(抖动必糊片)
1.前帘同步(通常是低速曝光时的默认状态,常称为低速同步,慢速同步):快门刚释放时就闪光
特点:被摄物体在快门释放时亮度最高(曝光最足)
2.后帘同步:快门快关闭时才闪光
特点:被摄物体在宽门关闭时亮度最高
应用:
a)拍摄运动物体
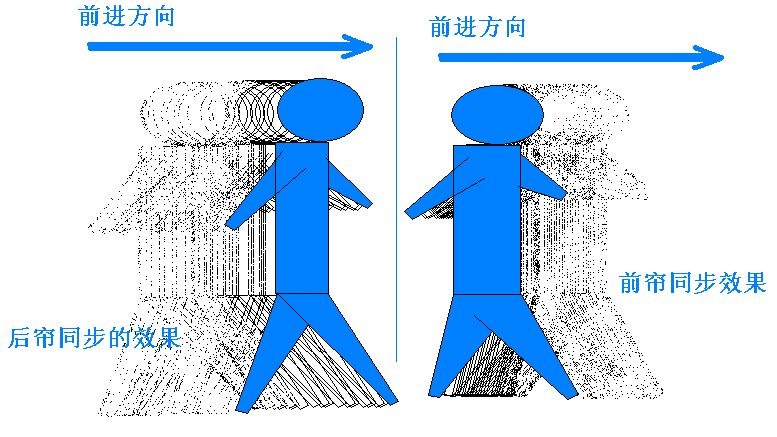
这张图就能说明的问题。
前帘同步时最初的影像是最清晰的,之后的影像渐渐模糊(龙珠里goku等瞬间消失就是这个效果)
后帘同步时最初的影像是模糊的,之后的影像是清晰的,形成拖影(还是龙珠,突然出现或者高速移动时背后的拖影就是这个效果)
PS1:在光线充足时若进行低速曝光,假设不过曝,基本就是后帘同步的效果。
如此图是我本人拍摄的,红灯前半段区域,最前面的车是静止的,自然没有拖影,后面的车在减速,有拖影,最后那辆车的红灯直接拉成一条线了

PS2:运动对象清晰,其余模糊的这种效果是通过相机同步移动形成的(相对线速度为0),如下图

b)拍摄静止物体
前帘同步和后帘同步的结果是相同的,因为人物没有动,曝光信息都在同一处堆积。
此时要关注的是闪光亮度,因为所有光子都在同一处堆积,如果闪的太亮,就可能直接把人物拍的亮的不正常(主要是色温不同)。
如下图:
第一个是高速快门,背景曝光不足。
第二个低速快门,背景曝光充足(但人和背景色温明显不同)。


如下图
第一个:背景曝光不足。
第二个:三脚架,无闪光,曝光充足,色温相同(可通过非常弱的闪光补光,人脸会更亮,且更自然些)

